DHT11 is the sensor temperature and humidity, he has a digital output signal is calibrated with temperature and humidity sensors are complex. This technology ensures high reliability and excellent long-term stability. microcontroller connected to the high performance of 8 bits. This sensor includes a resistive element and the NTC temperature gauges. Have excellent quality, quick response, anti-interference ability and high cost performance advantages.
Each sensor has a calibration feature DHT11 very accurate calibration of the humidity chamber. Calibration coefficients stored in the OTP program memory, internal sensors detect the signal in the process, we should call it the calibration coefficients. System of single-wire serial interface to be integrated quickly and easily. Small size, low power, the signal transmission distance up to 20 meters, so that different applications and even the most demanding applications. This product is 4-pin single pin package line. Convenient connection, special packages can be supplied according to user requirements.
specification
• Supply Voltage: 5 V
• Temperature range :0-50 ° C ± 2 ° C error
• Humidity :20-90% RH ± 5% RH error
• Interface: Digital
To display the temperature in laptop screen
Program on Arduino
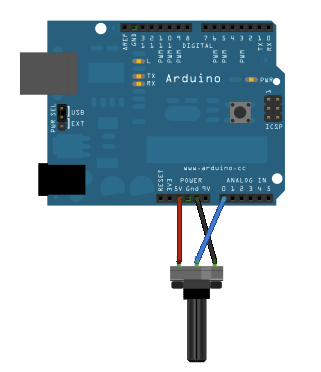
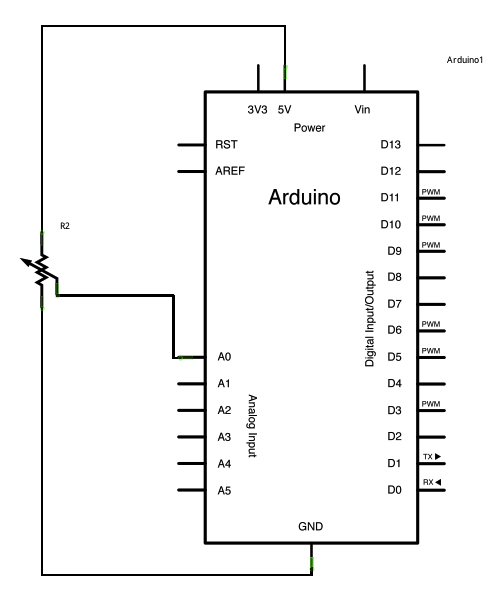
#define DHT11_PIN 0 // define analog port 0
byte read_dht11_dat()
{
byte i = 0;
byte result=0;
for(i=0; i< 8; i++)
{
while(!(PINC & _BV(DHT11_PIN)))
{}; // wait forever until anlog input port 0 is '1' (NOTICE: PINC reads all the analog input ports
//and _BV(X) is the macro operation which pull up positon 'X'to
'1' and the rest positions to '0'. it is equivalent to 1<
delayMicroseconds(30);
if(PINC & _BV(DHT11_PIN)) //if analog input port 0 is still '1' after 30 us
result |=(1<<(7-i)); this="" position="" is="" 1="" p="">
while((PINC & _BV(DHT11_PIN))); // wait '1' finish
}
return result;
}
void setup()
{
DDRC |= _BV(DHT11_PIN); //let analog port 0 be output port
PORTC |= _BV(DHT11_PIN); //let the initial value of this port be '1'
Serial.begin(9600);
Serial.println("Ready");
}
void loop()
{
byte dht11_dat[5];
byte dht11_in;
byte i;// start condition
PORTC &= ~_BV(DHT11_PIN); // 1. pull-down i/o pin for 18ms
delay(18);
PORTC |= _BV(DHT11_PIN); // 2. pull-up i/o pin for 40us
delayMicroseconds(1);
DDRC &= ~_BV(DHT11_PIN); //let analog port 0 be input port
delayMicroseconds(40);
dht11_in = PINC & _BV(DHT11_PIN); // read only the input port 0
if(dht11_in)
{
Serial.println("dht11 start condition 1 not met"); // wait for DHT response signal: LOW
delay(1000);
return;
}
delayMicroseconds(80);
dht11_in = PINC & _BV(DHT11_PIN); //
if(!dht11_in)
{
Serial.println("dht11 start condition 2 not met"); //wair for second response signal:HIGH
return;
}
delayMicroseconds(80);// now ready for data reception
for (i=0; i<5; i="" p="">
{ dht11_dat[i] = read_dht11_dat();} //recieved 40 bits data. Details are described in datasheet
DDRC |= _BV(DHT11_PIN); //let analog port 0 be output port after all the data have been received
PORTC |= _BV(DHT11_PIN); //let the value of this port be '1' after all the data have been received
byte dht11_check_sum = dht11_dat[0]+dht11_dat[1]+dht11_dat[2]+dht11_dat[3];// check check_sum
if(dht11_dat[4]!= dht11_check_sum)
{
Serial.println("DHT11 checksum error");
}
Serial.print("Kelembaban = ");
Serial.print(dht11_dat[0], DEC);
Serial.print(".");
Serial.print(dht11_dat[1], DEC);
Serial.print("% ");
Serial.print("Suhu = ");
Serial.print(dht11_dat[2], DEC);
Serial.print(".");
Serial.print(dht11_dat[3], DEC);
Serial.println("C ");
delay(2000); //fresh time
}
Output :
RESULTS AND PHOTO THE EXPERIMENT
Temperature and humidity that appear on the LCD
PROGRAM FEATURING Arduino UNO FOR TEMPERATURE, TEMPERATURE AND LIGHT INTENSITY ON THE SENSOR IN LCD 16X2 DHT11
//ReadHumTturDHT11alternate2
//ver 19Jly12
//This is a re-written DHT11/ DHT22 reading code.
//DHT stuff in subroutines.
//See for more information....
//
http://sheepdogguides.som/arduino/ar3ne1humDHT11.htm
//N.B. "bit" is used in the narrow, computer "1 or 0"
// sense throughout.
//"DHT" from sensor's names: DHT11, DHT22.
//DHT aka Aosong AM2302, and there's an AM2303 which
//seems to be in the same family.
//Comments on this based on Aosong AM2302, aka DHT22, datasheet.
//Believed to generally apply to DHT11 as well, except in the
//case of the DHT11, I believe the second and fourth bytes are
//always zero.
//***N.B.****
//The code WORKS... the comments may not yet be EXACTLY right.
//See the web-page cited above for latest news.
//This code works with a DHT11 humidity/ temperature sensing module
//from nuelectronics.com, complied with ver 0018 of the Arduino environment
//Sensor attached to P4 (nuelectonics shield)/ analog 0, aka digital 14.
//That "module", according to the
//nuelectronics site, and visual inspection simply provides for easy
//connection of an Aosong DHT11 unit to the nuelectronics datalogging
//shield. Only 3 wires are involved: Vcc, ground, and a single data
//line. One of the DHT11's 4 pins goes nowhere.
//You should not need to change anything except the next line to use
//the software with the sensor on a different line, or for a DHT22.
//Just "huffing" on the sensor from deeply filled lungs should show
//a near instant rise in humidity
//#define dht_PIN 0 //no ; here. deprecate ADC0...
//even though we are using it as a digital pin.
//Other parts of code restrict us to using
//ADC0-5, aka D14-19
#define dht_dpin 14 //no ; here. Set equal to channel sensor is on,
//where if dht_dpin is 14, sensor is on digital line 14, aka analog 0
#define LIGHT_SENSOR_PIN 1
// include the library code:
#include
// initialize the library with the numbers of the interface pins
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
byte bGlobalErr; //for passing error code back from complex functions.
byte dht_dat[4]; //Array to hold the bytes sent from sensor.
int light_intensity = 0;
unsigned int flip = 0;
void setup(){
//Blink LED to detect hangs
pinMode(13, OUTPUT);
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
lcd.print("HALLO, PUPUT!");
InitDHT(); //Do what's necessary to prepare for reading DHT
//Serial.begin(9600);
delay(300); //Let system settle
//Serial.println("Humidity and temperature\n\n");
delay(700); //Wait rest of 1000ms recommended delay before
//accessing sensor
} //end "setup()"
void loop(){
// set the cursor to column 0, line 1
// (note: line 1 is the second row, since counting begins with 0):
//lcd.setCursor(0, 1);
// print the number of seconds since reset:
//lcd.print("100");
//lcd.print(millis()/1000);
if ( flip & 1 )
{
digitalWrite(13, HIGH);
} else {
digitalWrite(13, LOW);
}
flip++;
light_intensity=analogRead(LIGHT_SENSOR_PIN);
ReadDHT(); //This is the "heart" of the program.
//Fills global array dht_dpin[], and bGlobalErr, which
//will hold zero if ReadDHT went okay.
//Must call InitDHT once (in "setup()" is usual) before
//calling ReadDHT.
//Following: Display what was seen...
switch (bGlobalErr) {
case 0:
lcd.setCursor(0, 0);
// Serial.print("humdity = ");
lcd.print("Suhu = C");
lcd.setCursor(7, 0);
lcd.print( dht_dat[2], DEC);
//Serial.print(dht_dat[0], DEC);
//Serial.print(".");
//Serial.print(dht_dat[1], DEC);
//Serial.print("% ");
lcd.setCursor(0, 1);
//Every 7 out of 15 times we show humidity, rest temp
if ((flip % 15) > 7 )
{
lcd.print("Kelembaban %");
lcd.setCursor(11, 1);
lcd.print( dht_dat[0], DEC);
} else {
lcd.print("Cahaya = ");
lcd.setCursor(8, 1);
lcd.print( light_intensity, DEC);
}
//Serial.print("temperature = ");
//Serial.print(dht_dat[2], DEC);
//Serial.print(".");
//Serial.print(dht_dat[3], DEC);
//Serial.println("C ");
break;
case 1:
//Serial.println("Error 1: DHT start condition 1 not met.");
break;
case 2:
//Serial.println("Error 2: DHT start condition 2 not met.");
break;
case 3:
//Serial.println("Error 3: DHT checksum error.");
break;
default:
//Serial.println("Error: Unrecognized code encountered.");
break;
} //end "switch"
delay(800); //Don't try to access too frequently... in theory
//should be once per two seconds, fastest,
//but seems to work after 0.8 second.
} // end loop()
/*Below here: Only "black box" elements which can just be plugged unchanged
unchanged into programs. Provide InitDHT() and ReadDHT(), and a function
one of them uses.*/
void InitDHT(){
//DDRC |= _BV(dht_PIN);//set data pin... for now... as output
//DDRC is data direction register for pins A0-5 are on
//PORTC |= _BV(dht_PIN);//Set line high
//PORTC relates to the pins A0-5 are on.
//Alternative code...
// if (dht_dpin-14 != dht_PIN){Serial.println("ERROR- dht_dpin must be 14 more than dht_PIN");};//end InitDHT
pinMode(dht_dpin,OUTPUT); // replaces DDRC... as long as dht_dpin=14->19
digitalWrite(dht_dpin,HIGH); //Replaces PORTC |= if dht_pin=14->19
} //end InitDHT
void ReadDHT(){
/*Uses global variables dht_dat[0-4], and bGlobalErr to pass
"answer" back. bGlobalErr=0 if read went okay.
Depends on global dht_PIN for where to look for sensor.*/
bGlobalErr=0;
byte dht_in;
byte i;
// Send "start read and report" command to sensor....
// First: pull-down i/o pin for 18ms
digitalWrite(dht_dpin,LOW); //Was: PORTC &= ~_BV(dht_PIN);
delay(18);
delayMicroseconds(600);//TKB, frm Quine at Arduino forum
/*aosong.com datasheet for DHT22 says pin should be low at least
500us. I infer it can be low longer without any]
penalty apart from making "read sensor" process take
longer. */
//Next line: Brings line high again,
// second step in giving "start read..." command
digitalWrite(dht_dpin,HIGH); //Was: PORTC |= _BV(dht_PIN);
delayMicroseconds(40); //DHT22 datasheet says host should
//keep line high 20-40us, then watch for sensor taking line
//low. That low should last 80us. Acknowledges "start read
//and report" command.
//Next: Change Arduino pin to an input, to
//watch for the 80us low explained a moment ago.
pinMode(dht_dpin,INPUT); //Was: DDRC &= ~_BV(dht_PIN);
delayMicroseconds(40);
dht_in=digitalRead(dht_dpin); //Was: dht_in = PINC & _BV(dht_PIN);
if(dht_in) {
bGlobalErr=1; //Was: Serial.println("dht11 start condition 1 not met");
return;
} //end "if..."
delayMicroseconds(80);
dht_in=digitalRead(dht_dpin); //Was: dht_in = PINC & _BV(dht_PIN);
if(!dht_in) {
bGlobalErr=2; //Was: Serial.println("dht11 start condition 2 not met");
return;
} //end "if..."
/*After 80us low, the line should be taken high for 80us by the
sensor. The low following that high is the start of the first
bit of the forty to come. The routine "read_dht_dat()"
expects to be called with the system already into this low.*/
delayMicroseconds(70);
//now ready for data reception... pick up the 5 bytes coming from
// the sensor
for (i=0; i<5; i="" p="">
dht_dat[i] = read_dht_dat();
//Next: restore pin to output duties
pinMode(dht_dpin,OUTPUT); //Was: DDRC |= _BV(dht_PIN);
//N.B.: Using DDRC put restrictions on value of dht_pin
//Next: Make data line high again, as output from Arduino
digitalWrite(dht_dpin,HIGH); //Was: PORTC |= _BV(dht_PIN);
//N.B.: Using PORTC put restrictions on value of dht_pin
//Next see if data received consistent with checksum received
byte dht_check_sum =
dht_dat[0]+dht_dat[1]+dht_dat[2]+dht_dat[3];
/*Condition in following "if" says "if fifth byte from sensor
not the same as the sum of the first four..."*/
if(dht_dat[4]!= dht_check_sum)
{bGlobalErr=3; } //Was: Serial.println("DHT11 checksum error");
}; //end ReadDHT()
byte read_dht_dat(){
//Collect 8 bits from datastream, return them interpreted
//as a byte. I.e. if 0000.0101 is sent, return decimal 5.
//Code expects the system to have recently entered the
//dataline low condition at the start of every data bit's
//transmission BEFORE this function is called.
byte i = 0;
byte result=0;
for(i=0; i< 8; i++) {
//We enter this during the first start bit (low for 50uS) of the byte
//Next: wait until pin goes high
while(digitalRead(dht_dpin)==LOW) ; //Was: while(!(PINC & _BV(dht_PIN)));
//signalling end of start of bit's transmission.
//Dataline will now stay high for 27 or 70 uS, depending on
//whether a 0 or a 1 is being sent, respectively.
delayMicroseconds(30); //AFTER pin is high, wait further period, to be
//into the part of the timing diagram where a 0 or a 1 denotes
//the datum being send. The "further period" was 30uS in the software
//that this has been created from. I believe that a higher number
//(45?) would be more appropriate.
//Next: Wait while pin still high
if (digitalRead(dht_dpin)==HIGH) //Was: if(PINC & _BV(dht_PIN))
result |=(1<<(7-i)); add="" not="" just="" addition="" the="" 1="" p="">
//to the growing byte
//Next wait until pin goes low again, which signals the START
//of the NEXT bit's transmission.
while (digitalRead(dht_dpin)==HIGH) ; //Was: while((PINC & _BV(dht_PIN)));
} //end of "for.."
return result;
} //end of "read_dht_dat()"
![SAMSUNG Galaxy S4 [i9500] - Black](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_sq9IsAVkh4yiiJEkz-2lS7QmERhK6e5ulOapGGbMJ-6r9KldXrIM7vAdUEiuim95MZpS-kPkhIIrgjVkF-G2H7hU737XWHrbf7tu0ccv83WP9yU3ZvcxeY3PU8U6d2oT5v2kHoHl24GtoAKHJaba3dQ9HNCZrwTgWm-WYAx3JtJnE=s0-d "SAMSUNG Galaxy S4 [i9500] - Black")


![SAMSUNG Galaxy Tab 2 10.1 Espresso 16GB - Silver [GT-P5100TSAXSE]](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_vbZSA89ojfkAvfloI5aNciphJFNMPs5z7pzDTXlQycF3fjPI3SXov4CmRvu81dR7KmchLUXCR-urWQoWilKHYRm5rJNgm_SG-8XrHKvuPgzoWZhviPY64DFp-_g0a2MH7QJBdmWbmbzzE9O-jKImhNLyjeCqZSCMqDCJTbpIwhri6dNrDC3eM4ayb5c9bmfww0QzZ4XvWKod-xohk4vw=s0-d "SAMSUNG Galaxy Tab 2 10.1 Espresso 16GB - Silver [GT-P5100TSAXSE]")

![ACER Iconia [W511] - (With Docking)](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_tZOgQ3pRjSxCepcCHGrNKjtcvsUOoFTlPGt1L6Ahheb00E0WUtCyZoNpZ-y79OlehALEZVnPgOUVz6N3qVRcdC_kMBcdatNu6kZ4UT2y3Jq826EF6KM_LwroTRNJPmtoGF5Ho3DrwmqYt6sDMrXAlLKn5dX_EZ9pvAqeAF0ABt4K9FAzE=s0-d "ACER Iconia [W511] - (With Docking)")